마운트 제어 보드의 고장, 펌웨어의 손상, 핸드컨트롤러 연결 케이블의 손상에 의해 발생하는 문제입니다.
핸드컨트롤러 연결 케이블을 다른것으로 교체해 보거나 펌웨어 업데이트를 시도한 뒤에도 여전히 문제가 해결 되지 않으면
수리를 위해서 마운트를 레인보우로보틱스로 보내주시기 바랍니다.
당사의 마운트는 적도의 모드일때 동쪽의 대상을 추적하다가 자오선을 만나면 스스로 추적을 멈춥니다.
대상이 자오선을 지난이후에 다시 Goto(Pointing, Slewing)를 하면 적경축을 flip하여 다시 대상을 지향하고 추적을 시작합니다.
하지만 다음의 방법으로 flip을 연기하거나 미리 할 수 있습니다.
Flip 연기
핸드컨트롤러의 7 Menu – Limit 메뉴에서자오선을 지나서 더 추적할 각도를 입력할 수 있습니다.
예를들어 Meridian에 30deg를 입력하면 마운트는 자오선을 만나더라도 30deg만큼 더 추적을 한 다음 추적을 스스로 멈춥니다.
30deg는 2시간과 같습니다.
미리 Flip하기
마치 대상이 이미 자오선을 지난것처럼 간주하여 mount를 미리 flip하는것입니다.
경통이나 카메라등이 삼각대와 부딪히지 않도록 주의해야 합니다.
핸드컨트롤러와 ASCOM Driver를 통한 두가지 방법이 있습니다.
1. 핸드컨트롤러 사용
대상 화면에서 1 GOTO버튼을 두번 누릅니다.
화면에 “Reverse Mode!!”라는 경고 메시지가 나옵니다.
ENT키를 누르면 대상을 미리 flip하여 지향합니다.
2. ASCOM Driver 사용
ASCOM Driver의 GUI에서 “Force flip”을 선택합니다.
이후 대상으로 Slew하면 미리 flip하여 지향합니다.
네. PC에 사용하는 일반적인 랜케이블(다이렉트 타입)을 핸드컨트롤러용 케이블로 사용해도 됩니다.
Star alignment를 통해서 구해진 각종 오차값을 Align angle메뉴에서 확인할 수 있습니다.
총 6개의 오류값을 확인할 수 있으며 각 값은 다음의 의미를 가지고 있습니다.
더 정확한 오류값을 알기 위해서는 5-star alignment를 권장합니다.
단위는 모두 각도입니다.
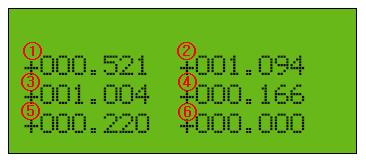
① 극축 오류 : 방위각
부호가 +이면 마운트의 극축이 실제 극축보다 서쪽을 바라보고 있다는것을 의미합니다.
② 극축 오류 : 고도
부호가 +이면 마운트의 극축이 실제 극축보다 더 낮은곳을 바라보고 있다는것을 의미합니다.
③ 초기위치 오류 : 적경
적경축의 초기 시작 위치 오류, 시간 오류, 관측지의 경도 오류를 의미합니다.
④ 초기위치 오류 – 적위
적위축의 초기 시작 위치 오류, 관측지의 위도 오류를 의미합니다.
⑤ 경통(광학계) 직교 오류
경통(광학계)과 적위축이 직교하지 않는 정도를 나타냅니다.
⑥ 적경, 적위 직교 오류
젹경축와 적위축이 직교하지 않는 정도를 나타냅니다.
마운트는 Planet 메뉴에 진입할때 마다 행성의 위치를 다시 계산합니다.
그 결과 마운트가 가지고 있는 행성의 적경/적위값 정밀도는 수 초각 이내입니다.
마운트의 Star alignment를 통해서 적위축과 광학계(망원경)가 직교를 이루지 않아서 생기는 cone error를 해결할 수 있습니다.
3개의 별을 alignment하면 마운트가 직교 오류를 계산하며 더 정확한 보정을 위해서 5 star alignment를 권장합니다.
당사의 마운트가 사용하는 역기점(Epoch)는 JNow입니다.
핸드컨트롤러와 ASCOM Driver에서 사용하는 모든 적경/적위값은 JNow 기준입니다.
당사의 마운트는 전원이 꺼지더라도 기억을하는 몇가지 데이터가 있습니다.
그 종류(메뉴)는 다음과 같습니다.
- Time & Date – 유저가 입력했거나 GPS로 부터 수신한 데이터를 저장하고 실시간 데이터로 자동으로 업데이트됩니다.
유저가 입력한 시간대(UTC offset)을 저장합니다. - Location – 유저가 입력했거나 GPS로 부터 수신한 데이터를 저장하고 있습니다.
- Speed setup
- Mount Config
- Parking
- User Define
- Communication – 선택된 통신방법을 저장하고 있습니다.
- Back light, Contrast
- Limit
- Drift Correct – On/Off 상태를 저장하고 있습니다.
- Drive – 가상 경위대 모드 여부를 저장하고 있습니다.
Auto Resume기능을 켜 놓은 경우에 다음의 데이터도 추가로 기억합니다.
- Star Alignment 데이터(Alignment angle)
- 마운트의 마지막 지향점 – 전원이 꺼지기전 마지막 위치를 기억하며 다시 전원이 켜지면 그 위치로 인식하고 있습니다.
네. ZWO사의 ASIAIR는 RST마운트를 공식 지원합니다. 마운트와 ASIAIR를 USB케이블로 연결후 마운트 목록에서 Rainbow RST/MC700GE 를 선택하시면 됩니다.
GOTO, Plate solving 뿐만 아니라 pier flip과 극축정렬까지 모든 기능이 잘 동작합니다. ASIAIR는 RST마운트의 사용을 더 편하고 즐겁게 해주는 좋은 도구입니다.
ENC err의 발생 원인은 다음과 같습니다.
- 입력 전압이 낮을 때
RST마운트는 DC 12V ~ 16V의 전압을 사용합니다.
입력 전압이 12V보다 낮지 않는지 확인하세요.
핸드컨트롤러의 [7 MENU] – Voltage & Temp에서 확인할 수 있습니다.
- 입력 전류가 모자랄때
배터리나 AC-DC어댑터의 출력 용량이 마운트의 소비 전류보다 큰지 확인하세요.
- 속도가 너무 빠르게 설정 되었을때
마운트의 고속 구동 속도가 너무 빠르게 설정되어 있을 수 있습니다.
메뉴얼을 참고하여 “Speed 3″의 속도를 변경하세요.
- 마운트나 망원경이 삼각대 등에 부딪혔을때
부딪힘이나 케이블의 당겨짐 등을 확인하세요.
핸드 컨트롤러의 방향키를 눌러도 마운트가 움직이지 않는것은 다음의 두가지 이유입니다.
- 방향키가 메뉴 이동에 사용되는 화면인 경우
ESC키를 여러번 눌러서 초기화면으로 이동한 다음 방향키를 누르세요.
또는 방향키가 메뉴이동에 사용되지 않는 화면에서 방향키를 누르세요.
- 방향키 속도가 느리게 설정 되어 있는 경우
방향키의 속도가 느리게 설정 되어 있는경우에 마운트가 움직이지 않는것으로 느낄 수 있습니다.
LCD하단에 있는 4개의 LED가 방향키 속도를 나타냅니다. 오른쪽으로 갈 수록 빠른 속도 입니다.
키패드의 [# +] 버튼을 눌러서 속도를 빠르게 하세요.
Ascom driver와 마운트가 연결되지 않을때는 다음을 확인하세요.
1. USB케이블로 연결하는 경우
1) Comport를 올바르게 선택했는지 확인하세요.
마운트가 연결된 Comport는 장치관리자에서 확인할 수 있습니다.
2) 마운트의 Communication이 USB Mode로 되어 있는지 확인하세요.
Hubo-i핸드컨트롤러의 [7 Menu] – Communication에서 확인할 수 있습니다.
3) 마운트의 Protocol이 Rainbow로 되어 있는지 확인하세요.
Hubo-i핸드컨트롤러의 [7 Menu] – Communication에서 확인할 수 있습니다.
2. WiFi로 연결하는 경우
1) 마운트의 Communication이 WiFi Mode로 되어 있는지 확인하세요.
Hubo-i핸드컨트롤러의 [7 Menu] – Communication에서 확인할 수 있습니다.
2) PC가 마운트의 WiFi에 접속되어 있는지 확인하세요.
마운트의 WiFi접속 정보는 Hubo-i핸드컨트롤러의 [7 Menu] – Communication – WiFi Information에서 확인할 수 있습니다.
3) 마운트의 Protocol이 Rainbow로 되어 있는지 확인하세요.
Hubo-i핸드컨트롤러의 [7 Menu] – Communication에서 확인할 수 있습니다.
파동기어(Strain wave gear) 감속기는 웜기어에 비해 큰 주기오차를 가지고 있습니다. 기어의 피치원이 작은것이 가장 큰 이유입니다. 저희가 RST-135마운트의 주기오차를 사양으로 발표하거나, 수치를 보장하지는 않습니다만 430초 주기에 약 +-30 초각의 주기오차를 가지고 있습니다. 따라서 천체사진을 위해 오토가이드는 필수이며 비교적 짧은 촛점거리의 렌즈와 짧은 노출로 노터치 촬영이 가능합니다.
RST-135는 휴대성이 강조된 제품이기 때문에 가볍고 강성이 높은 카본 삼각대를 사용하는것을 추천합니다.
마운트의 기본 구성품에는 카메라용 삼각대에 마운트를 장착할 수 있도록 3/8″탭이 있는 어댑터 플레이트가 포함되어 있습니다.
별매의 Half pier를 함께 사용하면 망원경이나 카메라가 삼각대와 부딪히는것을 줄일 수 있습니다.
추천하는 카본 삼각대 제품은 아래와 같습니다.
SuperMount Act series
Gitzo systematic 5 series
Gitzo systematic 3 series
Photoclam Astro tripod
ExoSky EX-404C
ExoSky EX-364C
K-Astec PTP-C22
Leofoto LN-404C
Xiletu L-404C
Innorel RT90C
RST-135 마운트는 아직 PEC(Periodic error correction)기능을 가지고 있지 않습니다. 파동기어(strain wave gear) 감속기는 주기오차에 대해 웜기어와는 조금 다른 특성을 가지고 있습니다. 웜기어는 주기오차의 반복성이 아주 좋은것에 비해 파동기어 감속기는 감속기에 가해지는 하중에 따라 주기오차의 크기가 변하는 특성이 있습니다. 다시 말해서 탑재하는 장비에 따라서 또는 망원경이 향하는 방향에 따라서 주기오차가 달리집니다. 그러한 이유로 PEC의 적용이 어렵습니다.
당사는 PEC기능을 개발하기 위한 많은 노력을 기울이고 있습니다. 추가 연구결과나 개발 진척이 있을 경우 업데이트 하도록 하겠습니다.
2019.11.01 작성함