“Keyboard mode” may appear on the hand controller by:
– Damaged hand controller cable
– Corrupted Firmware
– Damaged mount control board
Try replacing the cable or updating the firmware to fix it.
If it is not fixed, contact the dealer for board replacement.
Yes. The RST-135 works well with StellarMate.
When in equatorial mode, the RST mount tracks the east target and stops tracking itself when it encounters the meridian.
If the target crosses the meridian and then slews the mount again, it flips itself.
However, you can postpone the flip in the following way or flip it in advance.
Postpone flip
In the hand controller’s [7 Menu] – Limit menu, you can enter an angle to track further past the meridian.
For example, if you enter 30deg in Meridian, the mount tracks 30deg further, even if it encounters the meridian, then stops tracking itself.
30deg equals 2 hours.
Flip in advance
It is as if the target has already crossed the meridian and flipping the mount in advance.
Be careful not to bump the telescope or camera with a tripod.
There are two ways, hand controller and ASCOM driver.
1. Using a hand controller
On the target screen, press the [1 GOTO] button twice.
The warning message “Reverse Mode!!” appears on the screen.
When you press the ENT key, the mount flips in advance and aims it.
2. Using ASCOM Driver
Select “Force flip” in the GUI of the ASCOM Driver.
Afterwards, if you slew to the target, the mount flips in advance and aims it.
Yes. You can also use a common ethernet cable(CAT5, CAT6, CAT7) for PC as a hand controller cable.
Various error values calculated through Star alignment can be checked in the Align angle menu.
A total of 6 error values can be checked, and each value has the following meaning.
5-star alignment is recommended for more accurate error values.
The units are all angles(degrees).
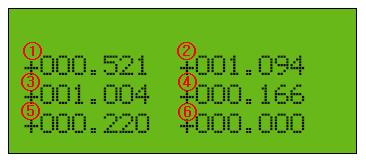
① Polar alignment error: Azimuth
A sign of + means that the polar axis of the mount is looking westward than the actual polar axis.
② Polar alignment error: Altitude
A sign of + means that the polar axis of the mount is looking lower than the actual polar axis.
③ Initial position error: right ascension
It means the initial starting position error of the right ascension axis, the time error, and the longitude error of the location.
④ Initial position error – declination
It means the initial starting position error of the DEC axis, and the latitude error of the location.
⑤ Orthogonal error of the OTA
The degree to which the OTA and DEC axes are not orthogonal.
⑥ RA/DEC axis orthogonal error
It indicates the degree to which the axis of DE and the axis of RA are not orthogonal.
Mount recalculates the planet’s position in real time each time you enter the Planet menu.
As a result, the accuracy of the RA/DEC value of the planet is within few arc seconds.
Through the star alignment of the mount, the cone error caused by the optical system (telescope) not being orthogonal to the DEC axis can be solved.
With 3-star alignment, the mount calculates orthogonal errors but a 5-star alignment is recommended for more accurate calibration.
The mount points to reflect orthogonal errors.
The Epoch used by the RST mount is JNow.
All the right ascension/declination values used in the hand controller and ASCOM driver are based on JNow.
The mount stores some data even when the power is turned off.
The types (menu) are as follows.
- Time & Date – Stores data entered by the user or received from GPS and is automatically updated with real-time data.
Save the time zone (UTC offset) entered by the user. - Location – Stores data entered by the user or received from GPS.
- Speed setup
- Mount Config
- Parking
- User Define
- Communication – The selected communication method is being saved.
- Back light, Contrast
- Limit
- Drift Correct – On/Off status is stored.
- Drive
When the Auto Resume function is on, the following data is also saved.
- Star Alignment Data (Alignment angle)
- The last position – remembers the last position before the power is turned off and recognizes it as the position when the power is turned on again.
Yes. ZWO’s ASIAIR officially supports the RST mount. Connect the mount and ASIAIR with a USB cable and select Rainbow RST / MC700GE from the mount list.
Not only GOTO and Plate solving but also pier flip and polar alignment work well. ASIAIR is a great tool to make using the RST mount easier and more enjoyable.
The causes of ENC err are as follows:
- When the input voltage is low
RST mount uses a voltage of DC 12V to 16V.
Check that the input voltage is not lower than 12V.
This can be checked in [7 MENU]-Voltage & Temp of the hand controller.
- When input current is insufficient
Check that the output capacity of the battery or AC-DC adapter is greater than the current consumption of the mount.
- When the speed is set too fast
The mount’s slew rate may be set too fast.
Please refer to the manual to change the speed of “Speed 3”.
- When the mount or the telescope hits a tripod
Check for bumps or pulled cables.
There are two reasons why the mount does not move when you press the arrow key on the hand controller.
- If the arrow key speed is set to slow
You may feel that the mount does not move if the arrow keys are set to a slow speed.
Four LEDs at the bottom of the LCD indicate the arrow key speed.
The far right is the fastest speed.
Press the [# +] button on the keypad to speed up.
- When arrow keys are used to navigate menus
Press the ESC key several times to go to the initial screen and press the arrow keys.
Or press the arrow keys on the screen where the arrow keys are not used to move the menu.
If the Ascom driver and the mount do not connect, check the following.
1. When connecting with a USB cable
1) Make sure you have selected the Com port correctly.
Com port can be checked in Device Manager.
2) Check if the communication of the mount is in USB mode.
You can check in [7 Menu]-Communication of Hubo-i hand controller.
3) Check if the protocol of the mount is set to Rainbow.
You can check in [7 Menu]-Communication of Hubo-i hand controller.
2. When connecting with WiFi
1) Check if the communication of the mount is WiFi Mode.
You can check in [7 Menu]-Communication of Hubo-i hand controller.
2) Make sure your PC is connected to the mount’s WiFi.
You can check the mount’s WiFi connection in [7 Menu]-Communication-WiFi Information of the Hubo-i hand controller.
3) Check if the protocol of the mount is set to Rainbow.
You can check in [7 Menu]-Communication of Hubo-i hand controller.
Strain wave gear has a large periodic error compared to worm gear. The main reason is the small pitch circle of the gear.
We don’t make an announcement or guarantee the figure about periodic error of RST-135.
However, it has a periodic error about +-30 arcsec in a 430 seconds cycle.
Thus the auto guide is needed for a photography, and unguided photography is possible using a short focal length lenses and short exposure.
Because the RST-135 is emphasized the portability, we recommend the carbon tripod which has light weight and strength.
The RST-135 includes an adapter with 3/8” tap for install the mount on tripod for the camera.
Also, you can prevent of telescope collision with camera if you bought a half-pier separately.
The listed product is carbon tripod we recommend.
SuperMount Act series
Gitzo systematic 5 series
Gitzo systematic 4 series
Gitzo systematic 3 series
Photoclam Astro tripod
K-Astec PTP-C22
Leofoto LN-404C
Xiletu L-404C
Innorel RT90C
RST-135 does not have PEC(Periodic Error Correction) function yet.
Strain wave gear has slightly different characteristics compared to worm gear in terms of periodic error.
Worm gears has good repeatability of periodic errors, while strain wave gear has the characteristic that the magnitude of periodic error varies depending on the weight of load.
In other words, periodic error depends on loaded equipment or direction of the telescope.
In this reason, it is difficult to apply the PEC function.
However, we making an effort to development of PEC. We will update it if there is further research or development.
2019.11.21